隨著無人機技術(shù)的飛速發(fā)展,其應(yīng)用場景從簡單的航拍娛樂擴展到物流配送、農(nóng)業(yè)植保、應(yīng)急救援、工業(yè)巡檢等復(fù)雜領(lǐng)域。在這一進程中,實現(xiàn)安全、可靠、智能的自主飛行成為核心訴求,而自主避障能力則是其基石。以同步定位與地圖構(gòu)建(SLAM)技術(shù)為核心的導(dǎo)航避障算法,正引領(lǐng)著無人機自主化研究的浪潮。將SLAM導(dǎo)航避障算法的深度教學(xué)、技術(shù)服務(wù)與開發(fā)相結(jié)合,是推動整個領(lǐng)域邁向更高處的關(guān)鍵路徑。
一、SLAM導(dǎo)航避障算法:無人機自主飛行的“智慧之眼”與“決策大腦”
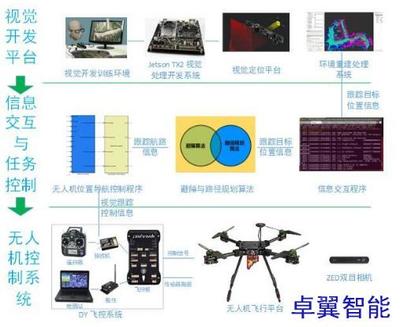
SLAM技術(shù)使得無人機能夠在未知環(huán)境中,實時構(gòu)建周圍環(huán)境的地圖,同時確定自身在地圖中的位置。結(jié)合激光雷達(LiDAR)、視覺傳感器(單目、雙目、RGB-D)、超聲波等多元感知數(shù)據(jù),SLAM算法為無人機提供了高精度、高魯棒性的環(huán)境感知能力。基于此構(gòu)建的3D點云地圖或語義地圖,是后續(xù)路徑規(guī)劃與動態(tài)避障的決策依據(jù)。
在教學(xué)研究中,深入理解SLAM的前端(數(shù)據(jù)關(guān)聯(lián)與位姿估計)、后端(優(yōu)化與閉環(huán)檢測)以及建圖模塊至關(guān)重要。經(jīng)典算法如ORB-SLAM、LOAM、VINS等,以及新興的基于深度學(xué)習(xí)的SLAM方法,構(gòu)成了豐富的教學(xué)與實踐內(nèi)容體系。通過剖析這些算法,學(xué)生和研究者能夠掌握無人機如何“看懂”世界,并為其“思考”如何安全航行奠定理論基礎(chǔ)。
二、面向高階教學(xué)的研究與實踐框架構(gòu)建
要讓教學(xué)研究“邁向更高處”,必須超越理論講解,構(gòu)建一個“理論-仿真-實機”一體化的進階式教學(xué)研究框架。
- 理論深化層:系統(tǒng)講授SLAM的數(shù)學(xué)基礎(chǔ)(如李群李代數(shù)、非線性優(yōu)化)、概率論基礎(chǔ)以及計算機視覺/點云處理相關(guān)知識。引入多傳感器融合(MSF)技術(shù),探討如何融合IMU、GPS、視覺和激光數(shù)據(jù)以提升在復(fù)雜場景(如動態(tài)環(huán)境、弱紋理、強光照變化)下的穩(wěn)定性。
- 仿真驗證層:利用Gazebo、AirSim、CARLA等高性能仿真平臺,搭建包含各種障礙物、動態(tài)物體和復(fù)雜光照條件的虛擬環(huán)境。在此環(huán)境中,學(xué)生可以安全、低成本地部署和測試自己的SLAM與避障算法,進行大量的參數(shù)調(diào)優(yōu)和性能評估,加速創(chuàng)新迭代周期。
- 實機開發(fā)與部署層:這是連接理論與實際應(yīng)用的橋梁。教學(xué)研究需涵蓋嵌入式系統(tǒng)(如PX4、ROS)、硬件在環(huán)(HIL)測試以及實際飛行平臺的算法部署、優(yōu)化與調(diào)試。重點解決算力約束、實時性要求、傳感器標定與數(shù)據(jù)同步等工程實踐難題。
三、全鏈條技術(shù)服務(wù)與定制化技術(shù)開發(fā)的雙輪驅(qū)動
純粹的教學(xué)研究需要與產(chǎn)業(yè)需求和技術(shù)前沿緊密結(jié)合,而專業(yè)的技術(shù)服務(wù)與開發(fā)是實現(xiàn)這一結(jié)合的有力引擎。
- 技術(shù)服務(wù):
- 算法咨詢與培訓(xùn):為高校實驗室、企業(yè)研發(fā)團隊提供針對性的SLAM/避障算法原理培訓(xùn)、代碼解讀與優(yōu)化建議。
- 方案設(shè)計與評估:根據(jù)特定應(yīng)用場景(如室內(nèi)倉儲巡檢、復(fù)雜林業(yè)勘測),提供傳感器選型、系統(tǒng)架構(gòu)設(shè)計及可行性評估服務(wù)。
- 仿真環(huán)境定制:為客戶構(gòu)建高度逼真、貼合業(yè)務(wù)需求的專用仿真測試環(huán)境,用于算法前期驗證。
- 技術(shù)開發(fā):
- 核心算法模塊開發(fā):開發(fā)或優(yōu)化面向特定硬件的輕量化SLAM前端、后端或閉環(huán)檢測模塊,提升在嵌入式平臺上的運行效率。
- 動態(tài)避障與路徑規(guī)劃集成:將SLAM構(gòu)建的地圖信息與高級路徑規(guī)劃算法(如A、D、RRT*)、動態(tài)窗口法(DWA)或基于強化學(xué)習(xí)的規(guī)劃方法相結(jié)合,開發(fā)出能夠?qū)崟r應(yīng)對突發(fā)障礙物的完整自主導(dǎo)航系統(tǒng)。
- 全棧系統(tǒng)解決方案:針對垂直行業(yè)(如電力巡線、智慧農(nóng)業(yè)),提供從感知、定位、建圖、規(guī)劃到控制的軟硬件一體化自主飛行解決方案,并完成系統(tǒng)集成、測試與交付。
四、邁向更高處:未來趨勢與融合創(chuàng)新
未來的無人機自主避障教學(xué)與研究,將更加注重以下幾個方向的融合與突破:
- 語義SLAM與場景理解:讓無人機不僅能構(gòu)建幾何地圖,還能識別場景中的物體類別(如行人、車輛、建筑物),實現(xiàn)更智能、更擬人化的避障與交互決策。
- 仿生智能與集群協(xié)作:研究鳥群、昆蟲的避障機制,并將其融入算法設(shè)計;探索多無人機集群的協(xié)同SLAM與分布式避障策略,實現(xiàn)“1+1>2”的系統(tǒng)能力。
- 邊緣計算與AI芯片賦能:借助專用AI計算芯片和邊緣計算設(shè)備,實現(xiàn)更復(fù)雜SLAM與視覺識別算法的機載實時運行,減少對遠程通信的依賴,提升自主性與安全性。
- 與5G/6G及數(shù)字孿生深度融合:利用高速低延遲通信,實現(xiàn)部分算力上云、云端高清地圖實時更新與下發(fā),并結(jié)合數(shù)字孿生技術(shù),在虛擬世界中預(yù)演和優(yōu)化無人機的全任務(wù)流程。
結(jié)論
讓無人機自主避障教學(xué)研究“邁向更高處”,是一個系統(tǒng)工程。它要求我們以SLAM導(dǎo)航避障算法為核心,搭建起從深度理論教學(xué)到高強度工程實踐的研究體系,并以專業(yè)的技術(shù)服務(wù)和敏捷的技術(shù)開發(fā)作為支撐,緊密對接學(xué)術(shù)前沿與產(chǎn)業(yè)實際。唯有如此,才能培養(yǎng)出具備扎實理論功底和強大工程創(chuàng)新能力的高層次人才,并催生出能真正落地、解決實際問題的先進技術(shù),最終推動無人機自主智能飛行技術(shù)不斷突破天際,抵達新的高度。